






标题:《深入解析单轴实时控制器原理图:设计与工作原理详解》
正文:
随着科技的发展,单轴实时控制器在工业自动化、机器人技术、航空航天等领域得到了广泛应用。本文将深入解析单轴实时控制器的原理图,从设计理念、工作原理、关键部件等方面进行详细阐述。
一、设计理念
单轴实时控制器的设计理念主要围绕提高控制精度、响应速度和稳定性展开。以下是设计理念的核心要点:
-
高精度:采用高性能的传感器和执行器,确保控制精度达到较高水平。
-
快速响应:采用高速微处理器和优化算法,实现实时控制,提高系统响应速度。
-
稳定性:通过合理的设计和调试,降低系统噪声,提高系统稳定性。
-
易于扩展:采用模块化设计,方便后续功能扩展和升级。
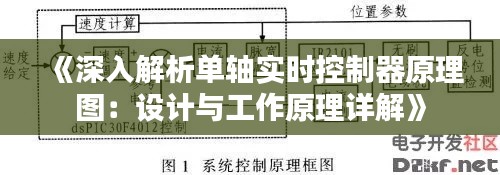
二、工作原理
单轴实时控制器的工作原理主要包括以下几个环节:
-
传感器采集:传感器实时采集轴的位置、速度、加速度等参数。
-
控制算法:根据采集到的参数,利用控制算法计算控制指令。
-
执行器驱动:将控制指令转化为执行器的动作,实现对轴的控制。
-
反馈调节:根据执行器的动作结果,对控制算法进行实时调整,提高控制精度。
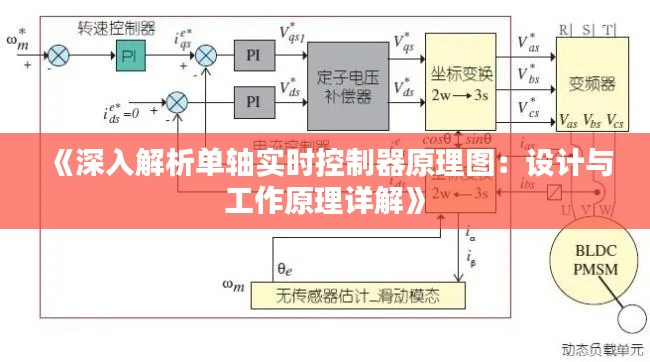
三、原理图解析
-
传感器模块:传感器模块主要包括位置传感器、速度传感器和加速度传感器。它们分别用于检测轴的位置、速度和加速度。
-
微处理器模块:微处理器模块是控制器的核心,负责处理传感器采集的数据、执行控制算法和驱动执行器。
-
执行器模块:执行器模块主要包括电机、减速器和驱动器。电机负责提供动力,减速器降低转速,驱动器将控制指令转化为电机的动作。
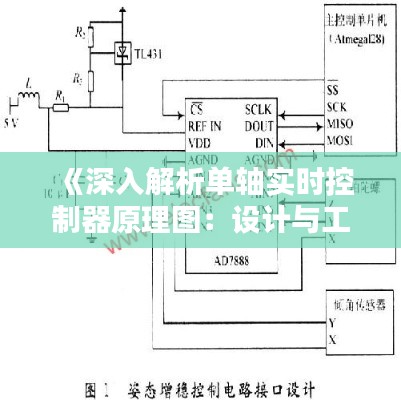
-
电源模块:电源模块为控制器提供稳定的电源,保证控制器正常工作。
-
通信模块:通信模块用于与其他设备进行数据交换,实现远程监控和控制。
四、关键部件
-
传感器:传感器的选择对控制精度有很大影响。常用的传感器有光电编码器、霍尔传感器、磁编码器等。
-
微处理器:微处理器的性能直接影响控制器的响应速度和精度。常用的微处理器有ARM、AVR、PIC等。
-
执行器:执行器的性能直接影响控制效果。常用的执行器有步进电机、伺服电机、直流电机等。
-
控制算法:控制算法是实现高精度控制的关键。常用的控制算法有PID、模糊控制、神经网络等。
总结
本文对单轴实时控制器的原理图进行了详细解析,从设计理念、工作原理、关键部件等方面进行了阐述。通过深入理解单轴实时控制器的工作原理,有助于提高相关领域的研发和应用水平。
转载请注明来自中国大学生门户网站,本文标题:《《深入解析单轴实时控制器原理图:设计与工作原理详解》》






 陇ICP备16000129号-1
陇ICP备16000129号-1