






标题:树莓派4B实时拍照与识别:打造智能图像处理系统
文章:
随着科技的不断发展,人工智能技术在各个领域的应用越来越广泛。树莓派作为一款低成本、高性能的单板计算机,因其丰富的扩展性和易于编程的特点,成为了许多爱好者和开发者进行创新项目的首选平台。本文将介绍如何利用树莓派4B实时拍照并实现图像识别,打造一个智能图像处理系统。
一、项目背景
在现实生活中,图像识别技术广泛应用于安防监控、自动驾驶、人脸识别等领域。树莓派4B凭借其强大的性能,可以轻松实现图像的实时捕捉和处理。本文将介绍如何利用树莓派4B搭建一个实时拍照与识别的系统。
二、所需材料
- 树莓派4B
- 树莓派电源
- 树莓派摄像头模块
- 树莓派底座
- SD卡(至少16GB)
- 电源线、数据线等连接线
三、系统搭建
- 准备工作
首先,将树莓派4B、摄像头模块、底座等材料准备好。将SD卡插入树莓派,并安装树莓派官方系统(Raspbian)。
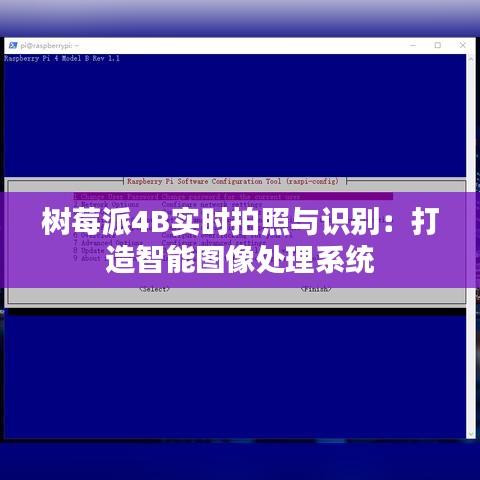
- 系统配置
在树莓派上,打开终端,输入以下命令进行系统配置:
sudo raspi-config在配置界面中,选择“Interfacing Options”,然后开启“VNC”和“Camera”选项。
- 安装所需软件
在树莓派上安装以下软件:
- OpenCV:用于图像处理和识别
- Python:用于编写程序
使用以下命令安装OpenCV:
sudo apt-get update
sudo apt-get install python3-opencv使用以下命令安装Python:
sudo apt-get install python3四、编写程序
- 导入所需库
在Python代码中,首先导入所需的库:
import cv2
import numpy as np- 初始化摄像头
cap = cv2.VideoCapture(0)- 实时拍照与识别
while True:
ret, frame = cap.read()
if not ret:
break
# 对图像进行预处理
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
thresh = cv2.threshold(blurred, 60, 255, cv2.THRESH_BINARY)[1]
# 查找轮廓
contours, _ = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 遍历轮廓并识别
for contour in contours:
if cv2.contourArea(contour) > 500:
x, y, w, h = cv2.boundingRect(contour)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.putText(frame, 'Detected', (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (36,255,12), 2)
# 显示图像
cv2.imshow('Frame', frame)
# 按'q'键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头资源
cap.release()
cv2.destroyAllWindows()五、总结
本文介绍了如何利用树莓派4B实时拍照并实现图像识别。通过搭建一个简单的系统,我们可以实现基本的图像处理功能。在实际应用中,可以根据需求对程序进行扩展和优化,实现更复杂的图像识别任务。
转载请注明来自中国大学生门户网站,本文标题:《树莓派4B实时拍照与识别:打造智能图像处理系统》
百度分享代码,如果开启HTTPS请参考李洋个人博客





 陇ICP备16000129号-1
陇ICP备16000129号-1